2025

CueLearner: Bootstrapping and Local Policy Adaptation from Relative Feedback
Giulio Schiavi, Andrei Cramariuc, Lionel Ott, Roland Siegwart
To appear in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2025
We propose a novel method to integrate relative human feedback (e.g. "throw the ball more to the left") with off-policy reinforcement learning. We show that our method can be used to bootstrap reinforcement learning in sparse-reward scenarios, and to adapt a policy a-posteriori to new environment constraints or user preferences.
CueLearner: Bootstrapping and Local Policy Adaptation from Relative Feedback
Giulio Schiavi, Andrei Cramariuc, Lionel Ott, Roland Siegwart
To appear in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2025
We propose a novel method to integrate relative human feedback (e.g. "throw the ball more to the left") with off-policy reinforcement learning. We show that our method can be used to bootstrap reinforcement learning in sparse-reward scenarios, and to adapt a policy a-posteriori to new environment constraints or user preferences.
2024
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Open X-Embodiment Collaboration
IEEE International Conference on Robotics and Automation (ICRA) 2024
As part of a large multi-institution collaboration, I contributed and cleaned data for a dataset spanning 22 robots, 21 institutions, and 527 skills, which was used to train the high-capacity RT-X model. The resulting generalist policy transfers capabilities across embodiments, improving downstream robots by leveraging demonstrations collected on other platforms.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Open X-Embodiment Collaboration
IEEE International Conference on Robotics and Automation (ICRA) 2024
As part of a large multi-institution collaboration, I contributed and cleaned data for a dataset spanning 22 robots, 21 institutions, and 527 skills, which was used to train the high-capacity RT-X model. The resulting generalist policy transfers capabilities across embodiments, improving downstream robots by leveraging demonstrations collected on other platforms.
2023
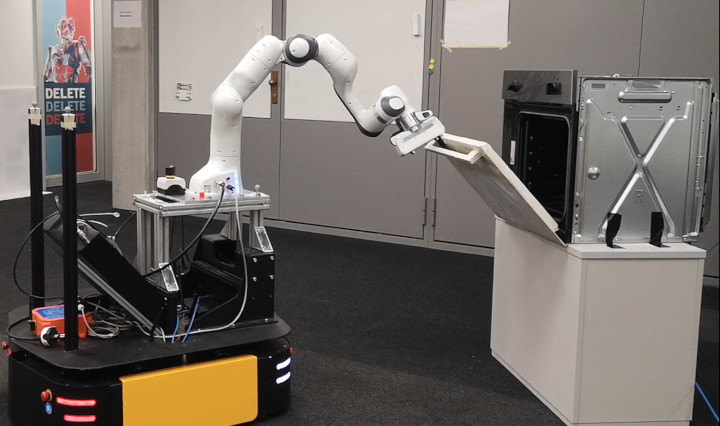
Learning Agent-Aware Affordances for Closed-Loop Interaction with Articulated Objects
Giulio Schiavi*, Paula Wulkop*, Giuseppe Rizzi, Lionel Ott, Roland Siegwart, Jen Jen Chung (* equal contribution)
IEEE International Conference on Robotics and Automation (ICRA) 2023
We propose a closed-loop manipulation pipeline that combines agent-aware affordance prediction with sampling-based whole-body control to tackle interactions with articulated objects. Conditioning affordances on the full embodiment lets the robot recover from failures and execute multi-stage tasks such as opening and closing household appliances with significantly higher success rates.
Learning Agent-Aware Affordances for Closed-Loop Interaction with Articulated Objects
Giulio Schiavi*, Paula Wulkop*, Giuseppe Rizzi, Lionel Ott, Roland Siegwart, Jen Jen Chung (* equal contribution)
IEEE International Conference on Robotics and Automation (ICRA) 2023
We propose a closed-loop manipulation pipeline that combines agent-aware affordance prediction with sampling-based whole-body control to tackle interactions with articulated objects. Conditioning affordances on the full embodiment lets the robot recover from failures and execute multi-stage tasks such as opening and closing household appliances with significantly higher success rates.